



產(chǎn)品詳情
一、慣性導航教學實驗系統(tǒng)介紹
1.系統(tǒng)用途
MIS-3DM-GD10慣性導航教學實驗系統(tǒng)(慣導/航姿/運動傳感),該系統(tǒng)標配UO 型雙軸電動轉(zhuǎn)臺、轉(zhuǎn)臺控制器和一個MEMS器件的AHRS航姿參考系統(tǒng),該傳感器由九軸慣性測量組合,包含三軸陀螺儀、三軸加速度計、三軸磁強計傳感器,能滿足導航、制導與控制專業(yè)的學生了解慣性導航及飛行控制原理,有助于學生理解、熟悉、掌握慣性導航/航向姿態(tài)/運動狀態(tài)采集的原理、技術及其應用,也可以滿足其它專業(yè)如飛行技術、航海技術、無人機技術、測繪技術等不同專業(yè)的慣性導航技術的科研和教學的使用。還可設計開發(fā)各類飛行器、車輛、船舶、機器人、工程機械、穿戴式等各類運動載體測量及控制的創(chuàng)新實驗。該系統(tǒng)具有完善教學實驗功能和開放的二次開發(fā)平臺功能,是高校開展導航類傳感器創(chuàng)新實驗的良好平臺,可以作為其他項目的數(shù)據(jù)采集驗證平臺。
1.1?功能特點
(1)較低的價格,可以讓眾多學生同時動手實驗,引領國內(nèi)慣導/航姿/運動傳感教學和實驗進入普及化時代;
(2)國內(nèi)首家配備低成本電動轉(zhuǎn)臺,可做定量實驗,更好的掌握慣導/航姿/運動傳感技術;
(3)提供全面的相關教學和實驗配套服務,減輕教師的負擔;
(4)集成度高,包含了各類運動相關傳感器;
(5)實驗覆蓋全面,從單一運動傳感器實驗到所有運動傳感器融合的綜合實驗;
(6)通過自身在國內(nèi)慣導/航姿/運動傳感領域的領先技術,實現(xiàn)慣導/航姿/運動傳感實驗室方案的不斷升級,真正使高校教學/實驗/科研水平跟上技術發(fā)展的潮流;
(7)可為學校量身定做相關實驗系統(tǒng);
(8)系統(tǒng)集成了多種模型,能夠完成各個學科,包括航天,航空,航海,陸地等載體的慣性導航實驗項目;
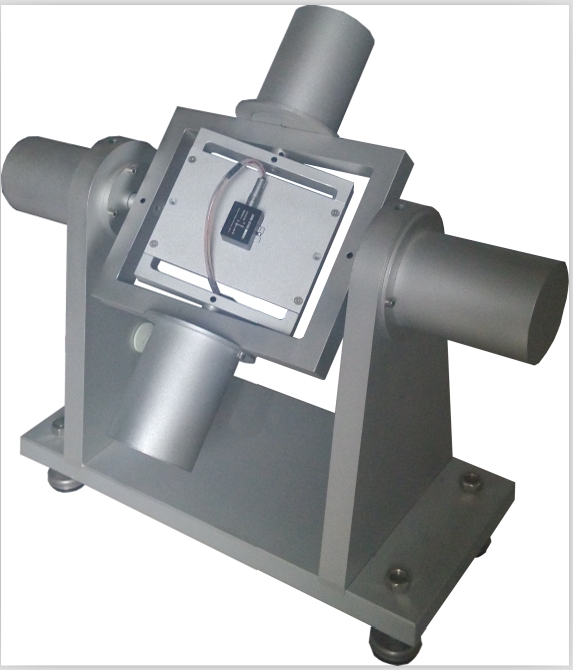
1.2?實驗設備

?
圖1-1 單套實驗設備圖
?
1.3?慣導/航姿模塊(3DM-E10A)
該模塊是一款微型的全姿態(tài)測量傳感裝置,它由三軸MEMS陀螺、三軸MEMS加速度計、三軸磁阻型磁強計等三種類型的傳感器構(gòu)成。三軸陀螺用于測量載體三個方向的的絕對角速率,三軸加速度計用于測量載體三個方向的加速度,在系統(tǒng)工作中,主要作用是感知系統(tǒng)的水平方向的傾斜,并用于修正陀螺在俯仰和滾動方向的漂移,三軸磁阻型磁強計測量三維地磁強度,用于提供方向角的初始對準以及修正航向角漂移。可提供的輸出數(shù)據(jù)有:原始數(shù)據(jù)、四元數(shù)、姿態(tài)數(shù)據(jù)等。
|
性能指標 |
參 ?數(shù) |
單位 |
|
輸出數(shù)據(jù)格式 |
原始數(shù)據(jù)、姿態(tài)角、四元數(shù) |
? |
|
內(nèi)部更新率 |
80 |
Hz |
|
啟動時間 |
< 1 |
sec |
|
靜態(tài)角度誤差(俯仰、滾動) |
± 0.1 |
degree |
|
動態(tài)角度誤差(俯仰、滾動) |
± 1.0 |
degree |
|
靜態(tài)角度誤差(航向) |
± 0.5 |
degree |
|
動態(tài)角度誤差(航向) |
± 2 |
degree |
|
航向角分辨率 |
<0.1 |
degree |
|
加速度計測量范圍 |
± 2 |
g |
|
速率陀螺測量范圍 |
± 300 |
°/sec |
?
1.4?雙軸電動轉(zhuǎn)臺(TT-3DM-2E-10)
機械臺體采用UO形鋁合金框架結(jié)構(gòu),由內(nèi)環(huán)橫滾軸框架和外環(huán)俯仰軸框架組成相互垂直的轉(zhuǎn)動架構(gòu),采用直流電機驅(qū)動旋轉(zhuǎn),實現(xiàn)三維空間任意位置和角度的姿態(tài)測量。具有位置、速率和搖擺三種測試功能。技術指標如下:
|
負載尺寸重量 |
50mm×50mm×50mm / 0.5 kg |
|
負載及夾具安裝空間 |
120 mm×120mm×120mm |
|
主軸與俯仰軸轉(zhuǎn)角范圍 |
360°連續(xù)無限 |
|
角位置綜合測量精度 |
±0.08o |
|
控制到位分辨率 |
±0.01o |
|
速率范圍 |
0.1o/s~300 o/s |
|
速率精度與平穩(wěn)度 |
1% |
|
測角數(shù)據(jù)采集頻率 |
20Hz |
|
用戶導電滑環(huán) |
12 環(huán)/每環(huán)2A |
|
臺體重量 |
25?Kg |
|
臺體尺寸 |
520mmL×400mmW×485mmH |
|
串口波特率 |
115200 bps |
|
工作電源 |
220VAC/200 |
?
1.5?雙軸采集控制器(CC-3DM-2E-10)
采集控制器通過USB或串行接口連接計算機實現(xiàn)航姿模塊信號的采集與電動轉(zhuǎn)臺的測量控制。
|
測角數(shù)據(jù)采集頻率 |
20Hz |
|
外形尺寸 |
260mmW×230mmW×88mmH |
|
串口波特率 |
115200 bps |
|
工作電源 |
220VAC/200W |
?
二?實驗平臺相關軟件介紹
2.1 轉(zhuǎn)臺控制軟件
轉(zhuǎn)臺控制軟件功能豐富,包括位置模式,速率模式,以及搖擺模式等等。能控制轉(zhuǎn)臺兩個軸分別進行運動。可以設定轉(zhuǎn)臺以某一角速率旋轉(zhuǎn)某一角度,也可以操縱轉(zhuǎn)臺持續(xù)以某一角速率旋轉(zhuǎn),也可以設定轉(zhuǎn)臺以某一幅角搖擺運動。
同時,考慮到實驗室安裝,調(diào)試的準確性,我們還增加了“置水平位”和“歸位”操作,分別能夠使轉(zhuǎn)臺旋轉(zhuǎn)至初始0度位置,和垂直于水平面的位置。這一功能能夠使在學生完成實驗之后,統(tǒng)一調(diào)整轉(zhuǎn)臺至同一姿態(tài),保證實驗室整齊整潔。

?
圖2-1 控制軟件截圖
2.2?航姿顯示實驗軟件
航姿顯示實驗平臺界面簡潔美觀,運行高效穩(wěn)定,操作簡單實用。同時軟件還進行了大量的數(shù)據(jù)采集操作,以固定步長收集軟IMU輸出的數(shù)據(jù),并將這些數(shù)據(jù)寫入文本文件和excel文件中,便于學生使用matlab和excel進行數(shù)據(jù)處理和姿態(tài)解算等等操作。
考慮到軟件的實用性,軟件中還可以自行設置步長以及自主選擇模型,共10種實物模型和1種簡單模型。包括:航空,航天,航海,陸地以及立方體模型。
在軟件操作方面,學生只需要點擊“寫入數(shù)據(jù)文件(txt和xls)”按鈕,即可將選定時間的數(shù)據(jù)保存在文件中,以備后續(xù)進行數(shù)據(jù)處理操作。這一功能不僅方便于學生進行實驗。在大作業(yè)方面,學生也只需要采集一組特定的數(shù)據(jù),將數(shù)據(jù)保存下來后,編寫自己的程序進行不斷的改進,而不需要一直連接轉(zhuǎn)臺才能進行實驗。
?
三 實驗方案介紹
轉(zhuǎn)臺上的IMU,能夠輸出以下數(shù)據(jù):包括線加速度、角速率、磁阻、四元數(shù)和姿態(tài)角。基于這些數(shù)據(jù)的采集,我們目前設計了以下實驗。
3.1基礎實驗.
利用慣性導航教學實驗平臺能夠完成的較為完善的基礎實驗:
?
|
實驗編號 |
實驗名稱 |
|
1 |
實驗系統(tǒng)安裝和軟件設置實驗 |
|
2 |
AHRS及微慣性傳感器認知實驗 |
|
3 |
加速度計測量與結(jié)果驗證實驗 |
|
4 |
加速度計標度因數(shù)和零偏的測量與計算實驗 |
|
5 |
陀螺靜態(tài)測量與零偏計算實驗 |
|
6 |
陀螺動態(tài)測量與標度因數(shù)估計實驗 |
|
7 |
采用磁傳感器的電子羅盤設計實驗 |
|
8 |
四元數(shù)法姿態(tài)解算程序設計實驗(大作業(yè)實驗) |
?
