產品詳情
斗輪機無人值守全自動作業系統方案下載
目前斗輪機的控制方式基本上分為手動模式以及半自動模式。
手動模式的運行方式:
斗輪機的所有運行機構包括輔助機構,均需要手動逐個操作(如:大車行走、懸臂俯仰、懸臂回轉、液壓馬達、大車夾軌器、懸臂皮帶、尾車皮帶、裙板擋板等),才可以開始人工手動作業。
手動模式的缺點:
取料時,司機注意力高度集中,操作頻繁,勞動強度大,取煤流量穩定控制難度大,取煤效率低。堆料時:堆高難以控制,容易造成皮帶磨損,作業時間長容易產生疲勞。夜間或雨霧天氣作業,容易產生誤判。現場工作環境差。
半自動運行模式的缺點:
堆煤時控制效果還行,邊界時還是需要手動干預。取煤時使用效果不理想,煤流控制不穩定,效率不高。無法實現定位中間過程人工干預較多。
斗輪機全自動無人值守系統必要性:
l 減少勞動強度
l 提高效率
l 防止過載多發
l 提高堆煤庫容
l 提高系統安全
煤場自動堆取為配煤參數提供基礎
1. 斗輪機全自動無人值守系統組成介紹
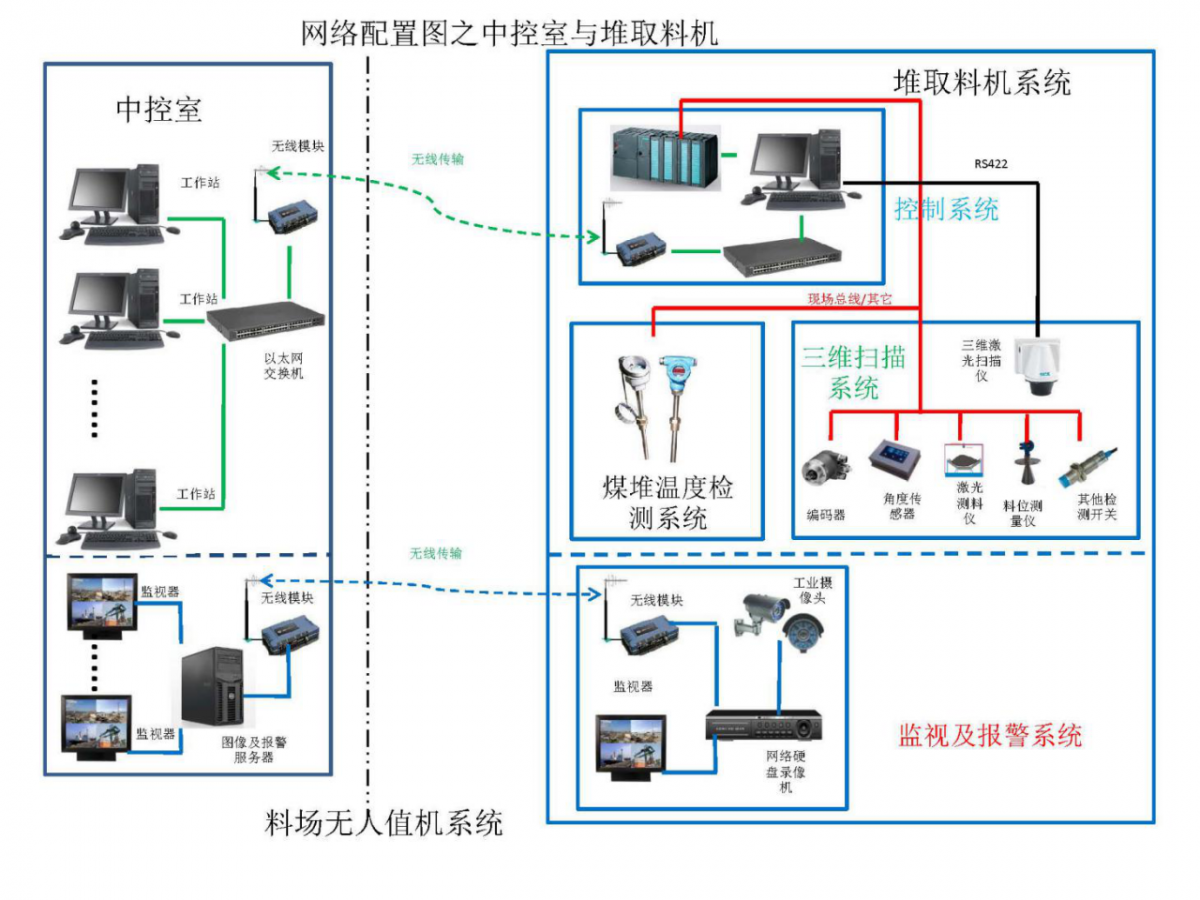
1.1. 系統組成
l 系統配置1臺工控機和1臺操作員站、1臺觸摸屏、1臺視頻主機。
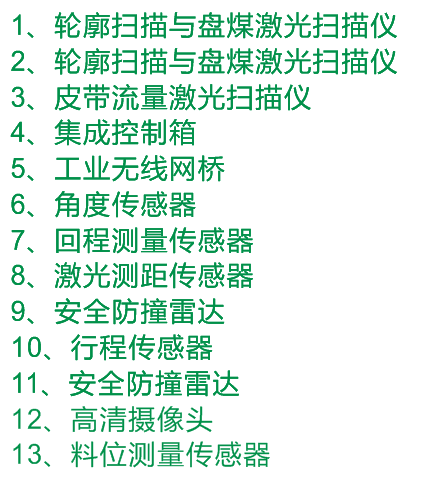
l 煤控與斗輪機通訊工業級無線網橋通訊,視頻監控配置硬盤錄像機,5個攝像機。大車位置,懸臂俯仰角度,回轉角度由定位檢測系統定位。懸臂頭部安裝料位測量傳感器,用來測量堆料料堆高度。
l 懸臂皮帶斗輪側安裝流量測量激光掃描儀,用來瞬時煤流量測量。
l 懸臂左右側安裝了兩套煤垛檢測裝置,用來掃描煤堆的形狀。
l 大車前后安裝了大車行走障礙物監測,當有前方或后方障礙物時,大車停止行走,當障礙物移除后,大車可以繼續行走。
具體組成清單和數量如下表:
|
項目 |
單臺配置 |
總數量(兩臺斗輪機配置) |
單位 |
|
輪廓掃描與盤煤激光掃描儀 |
2 |
4 |
臺 |
|
皮帶瞬時流量激光掃描儀 |
1 |
2 |
臺 |
|
煤堆高度測量傳感器 |
2 |
4 |
臺 |
|
行程測量傳感器 |
1 |
2 |
套 |
|
激光測距傳感器 |
2 |
4 |
臺 |
|
回程測量傳感器 |
1 |
2 |
套 |
|
俯仰測量傳感器 |
2 |
4 |
套 |
|
安全防撞傳感器 |
2 |
4 |
臺 |
|
無線通信模塊 |
1 |
2 |
套 |
|
現場集成控制器 |
1 |
2 |
套 |
|
司機室觸摸一體機 |
1 |
2 |
臺 |
|
煤堆料位測量傳感器 |
1 |
2 |
臺 |
1.2. 系統圖
1.3. 現場分布安裝圖